














東芝は物流現場において、ロボットハンドが正確かつ高速に対象物を掴む位置や掴み方を計算するAIを開発したと発表しました。
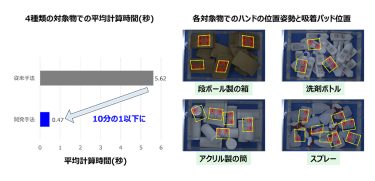
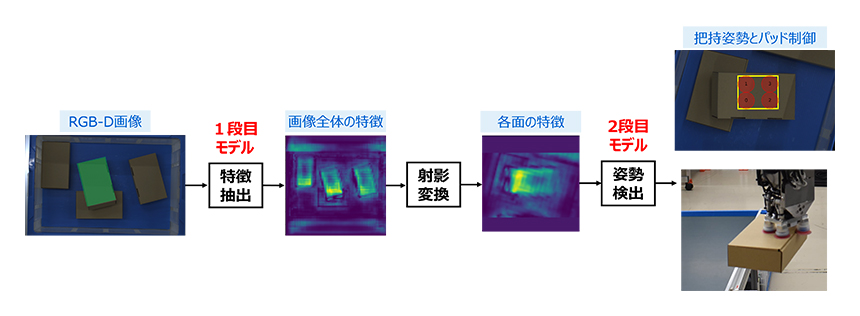
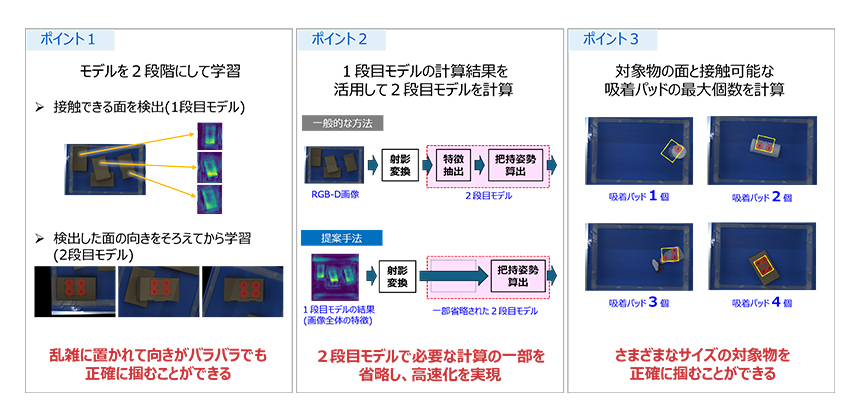
本技術は複数の吸着パッドを持つロボットハンドが、ピッキングする対象物の形状や姿勢に合わせて掴む位置と掴み方(把持計画)を正確かつ高速に計算するAI技術となります。
正確な把持計画を計算することで、効率的かつ確実に物体を取り扱うことができ、従来自動化が難しかった、乱雑に置かれた、形状や外観の異なる物品のピッキング作業を自動化することができます。
本AIの有効性を計算機で検証したところ、同様の条件の先行研究と比較し、計算時間が10分の1以下、成功率は6.2%向上し80.1%を実現したことを確認し、世界最高の平均計算速度と平均成功率が達成されました。
また本AIを実機のピッキングロボットに適用しピッキング作業を行ったところ、94.5%の確率で乱雑に置かれた形状や外観の異なる物品のピッキングに成功し、実用化レベルであることが確認されたとのことです。
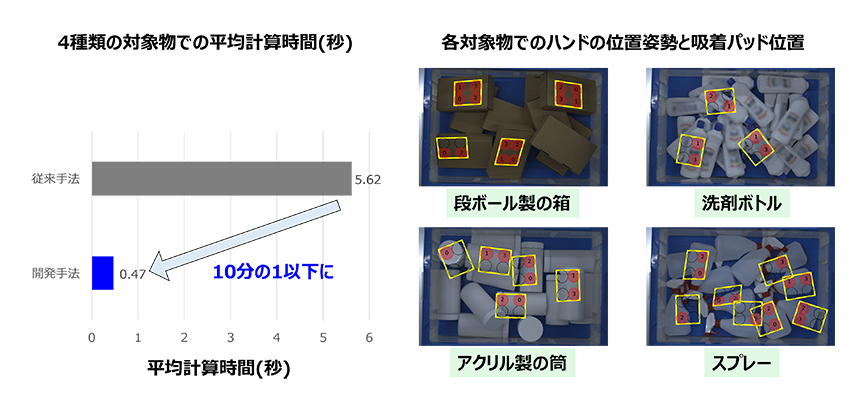
これにより、封筒や書類などの平面の物品から、各種サイズの箱や円筒容器、チューブ容器やブリスターパックなどの高さや奥行、凹凸のある物品など、形状や外観の異なる多種多様な物品をロボットハンドで高速かつ正確に自動でピッキングすることができるようになります。
また、学習にあたっては技術者によるプログラミングが不要で、ロボット導入後に対象物の種類が増えた場合でも追加学習が容易となり、ロボット全体のコスト低減につながります。
今後の展望
本技術の詳細は、10月14日から18日にかけてアブダビ首長国で開催されるロボティクス分野で世界トップクラスの国際学会「IROS(IEEE/RSJ International Conference on Intelligent Robots and Systems)2024」にて発表が行われるとのことです。
今後は実際の物流倉庫での実証やさらなる研究開発を進め、2026年度以降に本技術を搭載した製品の実用化を目指すとのことです。
関連リンク
リリース:https://www.global.toshiba/jp/technology/corporate/cmc/news/2024/2410-01.html